
робот рука манипулятор промышленный
Промышленные роботы рука манипулятор промышленный представляют собой автоматизированные устройства, используемые для выполнения широкого спектра задач в промышленности. Они обеспечивают высокую точность, скорость и надежность, что позволяет значительно повысить эффективность производства и снизить затраты. В данной статье мы рассмотрим основные типы промышленных манипуляторов, их применение, критерии выбора и особенности обслуживания.
Типы промышленных роботов-манипуляторов
Существует несколько основных типов роботов рука манипулятор промышленный, каждый из которых обладает своими особенностями и предназначен для выполнения определенных задач.
Артикулированные роботы
Артикулированные роботы, также известные как шарнирные, являются наиболее распространенным типом промышленных манипуляторов. Они состоят из нескольких вращающихся соединений, что позволяет им выполнять сложные движения в трехмерном пространстве. Количество осей вращения обычно варьируется от 4 до 7. Артикулированные роботы применяются для сварки, покраски, сборки и других операций, требующих высокой гибкости и точности.
SCARA роботы
SCARA (Selective Compliance Assembly Robot Arm) роботы отличаются высокой скоростью и точностью перемещения в горизонтальной плоскости. Они имеют жесткую конструкцию в вертикальном направлении, что делает их идеальными для сборки, упаковки и других операций, требующих быстрого и точного позиционирования. SCARA роботы часто используются в электронной промышленности и производстве потребительских товаров.
Дельта-роботы
Дельта-роботы, также известные как параллельные роботы, характеризуются высокой скоростью и точностью перемещения. Они состоят из нескольких параллельных рычагов, соединенных с платформой. Дельта-роботы применяются для сортировки, упаковки и других операций, требующих высокой скорости и точности. Они часто используются в пищевой промышленности и фармацевтике.
Картезианские роботы
Картезианские роботы, также известные как линейные роботы, перемещаются по трем линейным осям (X, Y, Z). Они отличаются высокой точностью и жесткостью, но имеют ограниченную гибкость. Картезианские роботы применяются для фрезеровки, сверления, сварки и других операций, требующих высокой точности и стабильности.
Применение промышленных роботов-манипуляторов
Роботы рука манипулятор промышленный находят широкое применение в различных отраслях промышленности. Рассмотрим некоторые из них.
Сварка
Роботизированная сварка обеспечивает высокую точность, скорость и качество сварных соединений. Роботы могут выполнять сварку различных материалов, таких как сталь, алюминий и нержавеющая сталь. Роботизированная сварка применяется в автомобильной промышленности, судостроении, строительстве и других отраслях.
Покраска
Роботизированная покраска обеспечивает равномерное нанесение краски и снижение расхода материалов. Роботы могут выполнять покраску сложных деталей и конструкций. Роботизированная покраска применяется в автомобильной промышленности, авиастроении, производстве мебели и других отраслях.
Сборка
Роботизированная сборка обеспечивает высокую скорость и точность сборки изделий. Роботы могут выполнять сборку различных компонентов, таких как электронные платы, автомобильные детали и бытовая техника. Роботизированная сборка применяется в электронной промышленности, автомобильной промышленности, производстве бытовой техники и других отраслях.
Упаковка
Роботизированная упаковка обеспечивает высокую скорость и точность упаковки продукции. Роботы могут выполнять упаковку различных товаров, таких как продукты питания, лекарства и потребительские товары. Роботизированная упаковка применяется в пищевой промышленности, фармацевтике, производстве потребительских товаров и других отраслях.
Обработка материалов
Роботы рука манипулятор промышленный используются для различных операций по обработке материалов, таких как фрезеровка, сверление, шлифовка и полировка. Роботы обеспечивают высокую точность и качество обработки. Обработка материалов роботами применяется в машиностроении, авиастроении, производстве инструментов и других отраслях.
Критерии выбора промышленного робота-манипулятора
Выбор подходящего робота рука манипулятор промышленный зависит от множества факторов. Рассмотрим основные из них.
Грузоподъемность
Грузоподъемность робота должна соответствовать весу обрабатываемых деталей и инструментов. Необходимо учитывать максимальный вес, который робот сможет безопасно и эффективно перемещать.
Рабочий диапазон
Рабочий диапазон робота должен охватывать все необходимые области рабочего пространства. Необходимо учитывать размеры обрабатываемых деталей и расположение оборудования.
Точность и повторяемость
Точность и повторяемость робота должны соответствовать требованиям технологического процесса. Необходимо учитывать допуски на размеры обрабатываемых деталей и требования к качеству сборки.
Скорость
Скорость робота должна соответствовать требованиям производительности. Необходимо учитывать время выполнения каждой операции и общее время цикла.
Среда эксплуатации
Среда эксплуатации робота должна соответствовать требованиям к защите от пыли, влаги, температуры и других факторов. Необходимо выбирать роботов, предназначенных для работы в конкретных условиях.
Стоимость
Стоимость робота должна соответствовать бюджету проекта. Необходимо учитывать стоимость робота, стоимость интеграции и стоимость обслуживания.
Обслуживание промышленных роботов-манипуляторов
Регулярное обслуживание роботов рука манипулятор промышленный является ключевым фактором для обеспечения их надежной и долговечной работы. Рассмотрим основные аспекты обслуживания.
Регулярные проверки
Регулярные проверки включают в себя визуальный осмотр робота, проверку соединений, проверку кабелей и проверку системы смазки. Регулярные проверки позволяют выявлять потенциальные проблемы на ранних стадиях и предотвращать серьезные поломки.
Замена масла и смазки
Замена масла и смазки является важной частью обслуживания роботов. Необходимо использовать рекомендованные производителем масла и смазки. Замена масла и смазки обеспечивает надежную работу механизмов и продлевает срок службы робота.
Калибровка
Калибровка робота необходима для обеспечения высокой точности и повторяемости. Калибровка включает в себя измерение параметров робота и корректировку системы управления. Калибровка должна выполняться квалифицированным персоналом.
Ремонт
В случае поломки робота необходимо обратиться к квалифицированным специалистам. Ремонт может включать в себя замену компонентов, ремонт электроники и ремонт механики. Важно использовать оригинальные запчасти или их качественные аналоги.
Примеры производителей промышленных роботов-манипуляторов
Существует множество производителей роботов рука манипулятор промышленный. Вот некоторые из наиболее известных:
- ABB
- Fanuc
- KUKA
- Yaskawa
- ООО Шэньян Андерсон Промышленные технологии, сайт: https://www.andersonautomation.ru/
- Kawasaki Robotics
Таблица сравнения основных характеристик роботов-манипуляторов (Пример)
| Тип робота | Грузоподъемность (кг) | Рабочий диапазон (мм) | Применение |
|---|---|---|---|
| Артикулированный | 5 - 1000+ | + | Сварка, покраска, сборка |
| SCARA | 1 - 20 | Сборка, упаковка | |
| Дельта | 0.5 - 5 | Сортировка, упаковка | |
| Картезианский | 1 - 1000+ | + | Фрезеровка, сверление |
Заключение
Роботы рука манипулятор промышленный являются важным элементом современной промышленности. Они позволяют повысить эффективность производства, снизить затраты и улучшить качество продукции. При выборе робота необходимо учитывать множество факторов, таких как грузоподъемность, рабочий диапазон, точность, скорость и среда эксплуатации. Регулярное обслуживание роботов является ключевым фактором для обеспечения их надежной и долговечной работы. Промышленные технологии ООО Шэньян Андерсон помогут оптимизировать ваши производственные процессы с помощью современных решений в области роботизации.
Соответствующая продукция
Соответствующая продукция







Самые продаваемые продукты
Самые продаваемые продукты-
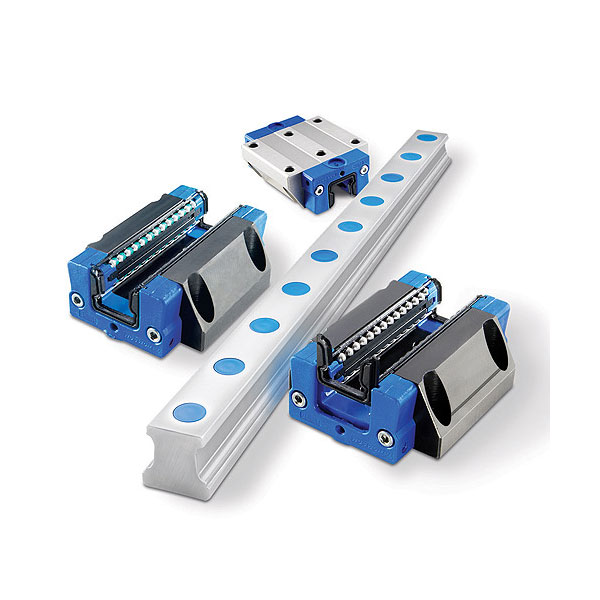 ЛИНЕЙНЫЕ шарикоподшипники
ЛИНЕЙНЫЕ шарикоподшипники -
 Ленточный конвейер ГРМ
Ленточный конвейер ГРМ -
 СИСТЕМЫ ИДЕНТИФИКАЦИИ
СИСТЕМЫ ИДЕНТИФИКАЦИИ -
 Преобразователь частоты WEG CFW500
Преобразователь частоты WEG CFW500 -
 датчик температуры ifm
датчик температуры ifm -
 УСТРОЙСТВА КОНТРОЛЯ БЕЗОПАСНОСТИ
УСТРОЙСТВА КОНТРОЛЯ БЕЗОПАСНОСТИ -
 Износостойкий ленточный конвейер
Износостойкий ленточный конвейер -
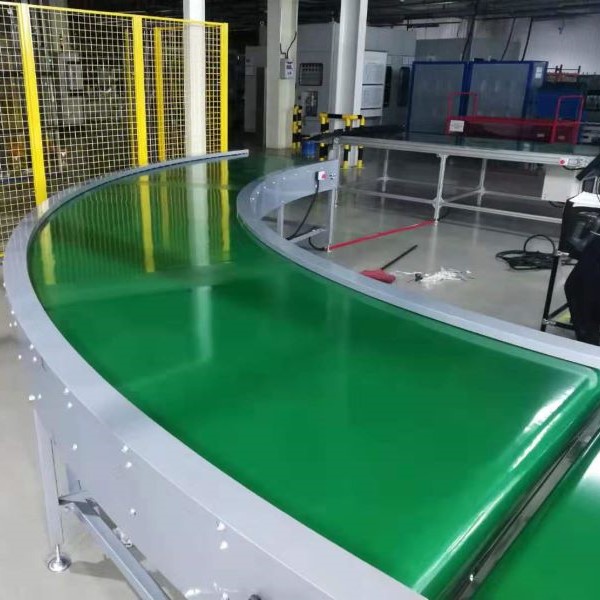 углы ленточного конвейера
углы ленточного конвейера -
 Индуктивные датчики приближения IMG
Индуктивные датчики приближения IMG -
 Серия Extrusion Technology 40 мм
Серия Extrusion Technology 40 мм -
 Датчик вибрации
Датчик вибрации -
 Базовая система защитных ограждений
Базовая система защитных ограждений
Связанный поиск
Связанный поиск- самый лучший Защита от перенапряжения
- самый лучший Оптическая передача данных
- высокое ксчество Fortress Interlocks
- самый лучший Разъемы для передачи данных
- Китай ВЫКЛЮЧАТЕЛИ И ЗАМКИ
- известный ОПТИЧЕСКИЕ ПРЕДОХРАНИТЕЛЬНЫЕ УСТРОЙСТВА
- высокое ксчество Предохранительный выключатель для навесных ограждений
- Производитель лучших промышленных роботов манипуляторов
- магнитный датчик скорости
- Машина для ультразвуковой очистки углеводородов с вакуумной сушкой